Alternatif Pemetaan Rute Drone Menggunakan Model Matematis
Prof Makoto Yamashita saat mengisi kuliah di International Guest Lecture Departemen Matematika ITS
Kampus ITS, ITS News — Selain sebagai alat fotografi udara, drone dapat digunakan sebagai media pengiriman barang. Namun, pesawat nirawak kendali jarak jauh ini memiliki masalah inheren yaitu jarak yang terbatas. Untuk itu, melalui kuliahnya, Prof Makoto Yamashita memberikan alternatif solusi menggunakan pendekatan model matematis.
Guru besar Department of Mathematical and Computing Science Tokyo Institute of Technology ini menjelaskan, sebagai alat pengiriman, drone memiliki banyak kelebihan. Salah satunya, dapat mencapai tujuan spesifik secara langsung tanpa melalui infrastruktur jalan. “Keunggulan ini sangat berguna apabila digunakan untuk pengiriman barang dengan lintas perairan,” terangnya.
Namun, kecilnya kapasitas baterai pada kebanyakan drone saat ini menjadi kelemahannya dalam melakukan pengiriman jarak jauh. Oleh karena itu, Makoto mengusulkan sebuah metode pengiriman paket yang mengintegrasikan sistem antara drone dengan sebuah kendaraan perantara seperti truk ataupun kapal.
Dengan bantuan kendaraan perantara ini, drone dapat mengurangi jarak terbangnya menuju destinasi akhir. Ia menjelaskan, kapal atau truk akan membawa paket dari pemasok beserta drone ke koordinat-koordinat tertentu yang sudah ditentukan. 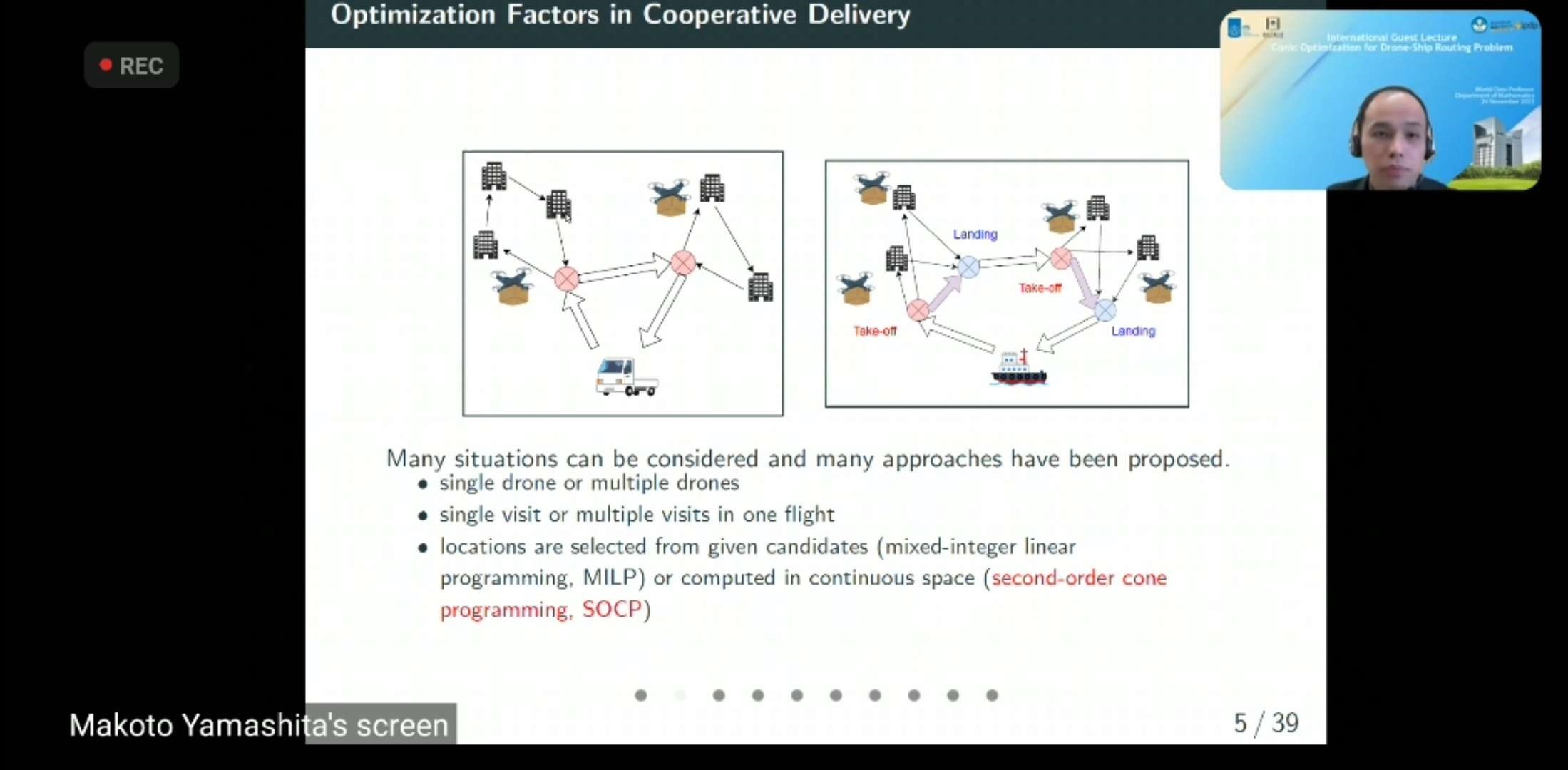 Prof Makoto Yamashita menjelaskan pengetahuan dasar dalam perencanaan rute optimal drone
Prof Makoto Yamashita menjelaskan pengetahuan dasar dalam perencanaan rute optimal drone
Awalnya, lokasi koordinat ini terdiri dari beberapa kandidat titik yang disediakan terlebih dahulu di rute perencanaan. Lalu, penentuan koordinat ditetapkan dengan rumusan matematika yang didasarkan oleh sebuah model matematis. “Pada sistem ini dapat menggunakan dua macam model yaitu Mixed-Integer Linear Programming (MILP) dan Second-Order Cone Programming (SOCP),” sebut profesor yang memiliki minat pada metode numerik yang efisien pada masalah optimasi kerucut ini.
Makoto melanjutkan bahwa perbedaan kedua metode ini terdapat pada implementasinya. Model MILP lebih cocok digunakan untuk perencanaan rute dengan ruang yang memiliki titik-titik diskrit seperti jalanan perkotaan, sehingga cocok untuk diimplementasikan menggunakan truk.
Sedangkan SOCP lebih cocok digunakan untuk ruang dengan titik-titik kontinu seperti perairan, sehingga cocok untuk diimplementasikan menggunakan kapal. “Secara operasi kapal dapat bergerak ke arah mana saja dengan jalur yang lebih bebas asalkan masih di dalam wilayah perairan,” ulasnya.
Setelah koordinat-koordinat tersebut ditentukan, sebuah rute akan digambar untuk dilalui oleh truk maupun kapal. Drone lalu akan dilepas dari setiap koordinat tersebut dan diterbangkan menuju tujuan-tujuan akhir lalu kembali ke titik awal. “Satu drone dapat terbang ke satu atau dua destinasi sekaligus sebelum mendarat kembali ke kendaraan perantara,” ucap Makoto.
Penggunaan model MILP dan SOCP model ini terbatas kepada pengunaan satu drone. Jika lebih dari satu digunakan model Mixed-Integer Second Order Cone Programming (MISOCP) atau Iterative Local Method (ILM).
Ia berharap bahwa model umum yang diusulkannya dapat digunakan untuk menyelesaikan permasalahan rute pengiriman barang di berbagai bidang dan industri. “Walaupun sistem ini telah ada sebelumnya, semoga penelitian ini dapat terus berkembang dan tidak hanya digunakan untuk pengiriman barang,” tandasnya pada acara yang diadakan oleh Departemen Matematika Institut Teknologi Sepuluh Nopember (ITS), Kamis 24 November lalu. (*)
Reporter: Kevin Bahari Pratama
Redaktur: Fatima Az Zahra
Berita Terkait
-
Peduli Lingkungan, FSAD ITS Gandeng BSI Kelola Limbah Botol Plastik
Kampus ITS, ITS News — Dukung tekad Institut Teknologi Sepuluh Nopember (ITS) dalam menjalankan program Smart Eco Campus, Fakultas Sains
21 Desember 2022, 07:12 -
Robot Terbang Bayucaraka ITS Sukses Borong Juara di KRTI 2024
Kampus ITS, ITS News — Institut Teknologi Sepuluh Nopember (ITS) kembali meraih pencapaian gemilang di ajang Kontes Robot Terbang Indonesia
21 Desember 2022, 07:12 -
Raih IPK 3,97, John Dinobatkan sebagai Wisudawan Terbaik ITS
Kampus ITS, ITS News — Memimpikan kebermanfaatan bagi sesama, mahasiswa Departemen Desain Produk Industri (Despro) Institut Teknologi Sepuluh Nopember (ITS)
21 Desember 2022, 07:12 -
Lulus di Usia 20 Tahun, Membawa Ester Jadi Wisudawan Termuda ITS
Kampus ITS, ITS News — Usia belia, 20 tahun 4 bulan, bukan penghambat bagi Ester Hotmaria untuk berhasil lulus dan
21 Desember 2022, 07:12